Space Robotics
A robot is a machine capable of automatically executing complex tasks. Each robot is specifically designed to do one or more particular tasks. Robots may be controlled by a human with a control device, by a computer to which it is connected, or they may be completely autonomous and decide by themselves when to do what. Autonomous robots may even learn each time they perform a task.
Exploration is probably the field of study where the role of robotics is most important. No human has ever gone further than the Moon, still, thanks to Space Robotics, thousands of scientist have explored Mars, a planet millions of kilometers away from any place where anyone has ever been. And even where the humankind has actually been exploring the space in person, like in the Moon or in the International Space Station (ISS), Space Robotics was there, paving the way.
Space Robotics has two main areas of interest: Orbital Robotics and Planetary Rovers & Landers. Orbital Robotics is specialized on autonomous task in scenarios with no gravity, such as International Space Station (ISS) operations and satellite servicing. Planetary Rovers, on the other hand, are designed to operate in the surface of the planets and moons of the Solar System. Some scenarios such as asteroid and comet exploration have environments with low gravity which may blur the distinctions between these categories.

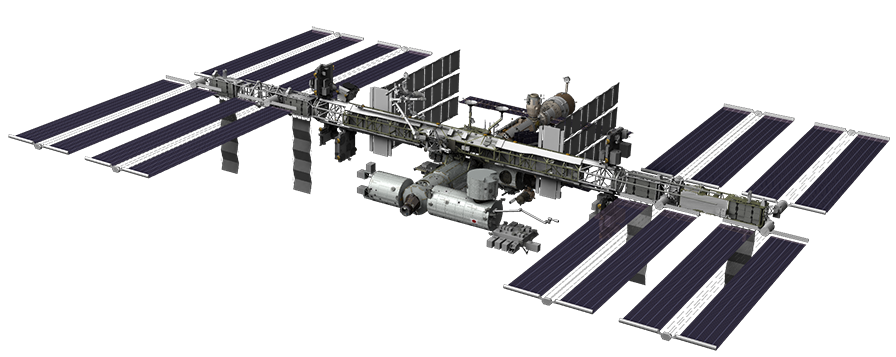
Orbital Robotics
The Space Industry manufactures extremely complex and delicate machinery, for this reason, many tasks regarding satellite servicing and operations in the ISS can not easily be done by humans. Moreover, space is a hostile environment, and this tasks may be dangerous and not adequate for us. Robotic solutions are a great choice to overcome this complicated situations. In addition to difficult and risky operations, some tasks that must be done in space are exigent and repetitive. Robots may also be useful with these.
For Orbital Robotics, the space environment (no gravity, high radiation levels, extreme thermal changes, etc.) poses unique challenges to these robots design and manufacturing. Each part, each piece, each subsystem must be conceived to survive and operate in space. And the challenge does not end here, the robot’s brain, all the software that will control the movements and operations of the robot has to be specially designed for space too. Despite this challenges, in space, robots are used every day, and its importance is expected to increase in the coming years.

In addition to the usual considerations in robot design such as power sources, control interfaces, electromechanical design, etc. the orbital robotics sector as its own particular concerns like micro-gravity locomotion, thermal considerations, radiation resistance and many more. For these reasons its important to carefully choose appropriate materials, structures, designs and protocols for these special machines.
If you are thinking about a possible orbital robotic solution, consider contacting us through the form below and our expert team will study the circumstances of your case and create a robot, robotic component or robotic software for you.
Orbital Robotics
Planetary Rovers
Planetary Rovers & Landers
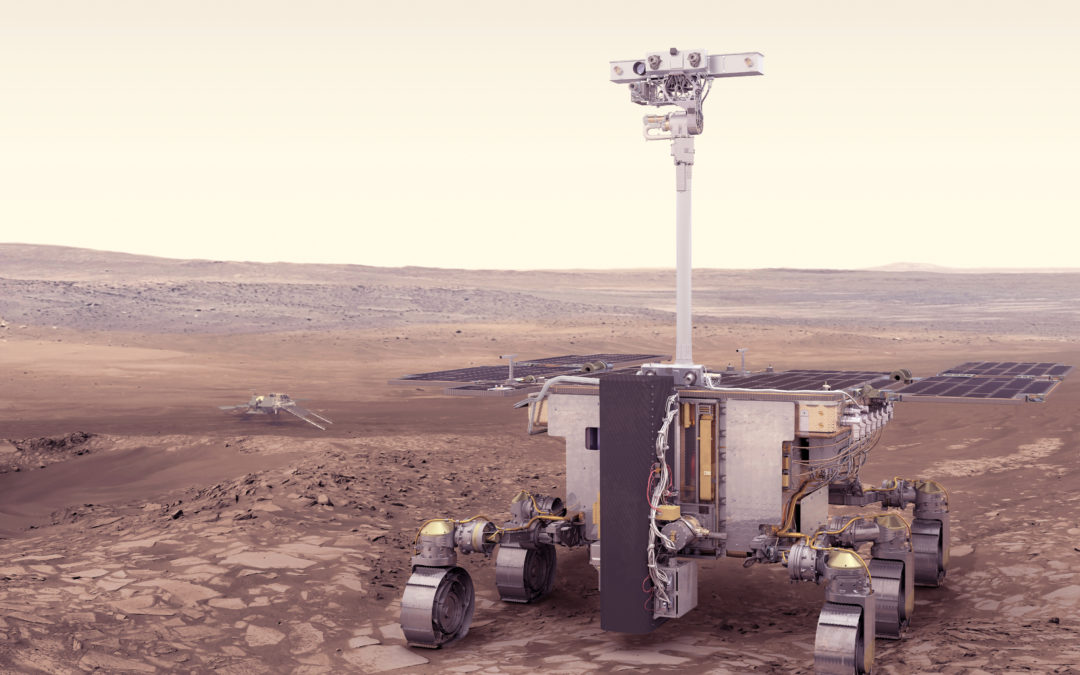
Like space, other planets than Earth are hostile environments too, and sending astronauts to explore them has so far been too risky. Once again robots are the best choice to overcome this impediment. For example, many of the things we know about Mars have been discovered by Mars Rovers that autonomously move and investigate in this planet’s surface. Its foreseen that more Rovers will be sent in the near future to keep exploring new worlds, and even when we are ready to send astronauts to other planets, human-robot cooperation will be essential for these mission’s success.
Planetary Rovers also present unique challenges. Automatic landings in other planets that cause no damage to the payload are no easy task. Once in the surface, the robot must face harmful weather conditions in unpredictable atmospheres. And even with the best conditions, there are always bug uncertainties when interacting with an unexplored natural terrain. Important concerns when designing Planetary Rovers include:
- Sensing and perception for planetary exploration, including terrain-relative precision position estimation.
- Above-surface, surface, and sub-surface planetary mobility, possibly from novel vehicle design concepts.
- Command and control with limited bandwidth, often precluding teleoperation and requiring autonomous surface operations, with natural terrain navigation and manipulation.
We rely on a team of expert engineers capable of creating robots, robotic components and robotic software solutions to operate in other planets. Moreover we have a long experience in building customized scaled models to test prototypes of new technologies and software in simulated conditions in Earth.

Request our Services
Rovers
Drones & others
Software
Hardware
Idea
Analysis & Creation
Testing
%
Final Delivery

Work with us! New positions opened in SpaceRobotics.EU
Thinking about working with us? Fill out this form and send us an email with your CV. We will contact you if a position suits your profile. Currently, we are opening new projects in the Virtual Reality, Robotics and Education departments. Check out the following...
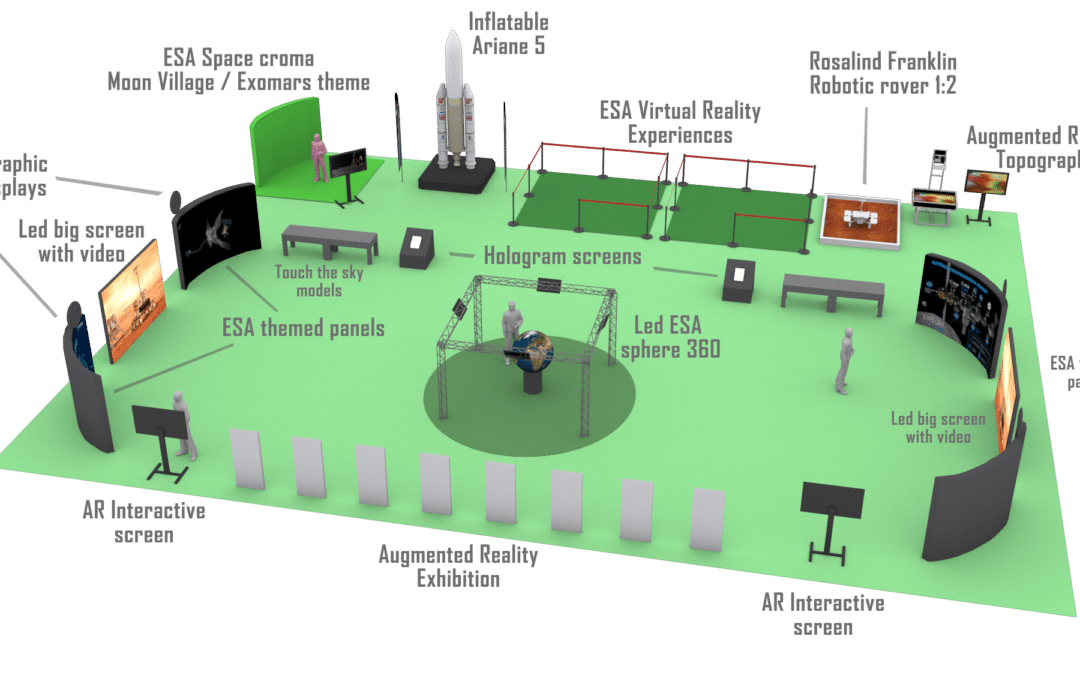
Space exhibitions for museums and events
The company Nubalo Studios S.L. is one of the world's leading exhibition design and production companies for fairs and museums. Since our beginnings, we have worked for different space agencies and educational institutions, creating innovative and attractive...

Robotic Rosalind Franklin v3 – COVID online demostrator
The European Space Agency (ESA) will launch the robotic rover Rosalind Franklin towards Mars in 2022. As the exploration of Mars prepares for a rebirth, the European rover hones its equipment for the challenges that lie ahead. ExoMars 2020 will deliver a rover and a...

Working towards a way out the COVID-19 alert
Like everyone else, SpaceRobotics.EU has taken extraordinary measures due to the covid_19 sanitary alert. Besides asking all our employees to work on-line from their homes to limit human contact and stop the propagation, at SpaceRobotics.EU we are contributing to...
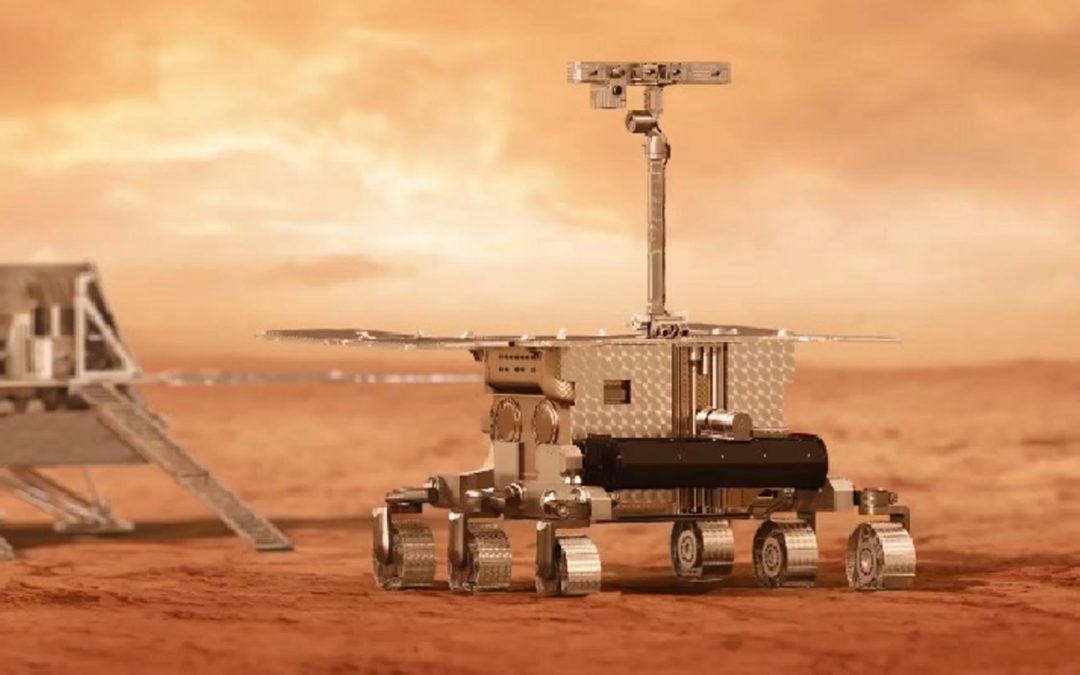
ExoMars Rosalind Franklin 1:2 Robot Update
We update our functional robotic scaled model of ESA's ExoMars' Rosalind Franklin rover. On ExoMars 2020 ExoMars 2020 will deliver a rover and a surface platform to our neighbour planet. Like in the previous ExoMars mission, a Russian...
ExoMars Rosalind Franklin 1:2 Robot
We design and build a functional robotic scaled model of ESA's ExoMars' Rosalind Franklin rover. About ExoMars 2020 ExoMars 2020 will deliver a rover and a surface platform to our neighbour planet. Like in the previous ExoMars mission, a...

Software and Documentation for TBT Robotic Telescope
We have recently assembled the software for a completely new space-related project: TBT, a robotic telescope that will look for unidentified objects close to Earth. Within ESA's SSA and GSTP programmes the TBT project was born in 2012 to detect and keep track on NEOs....
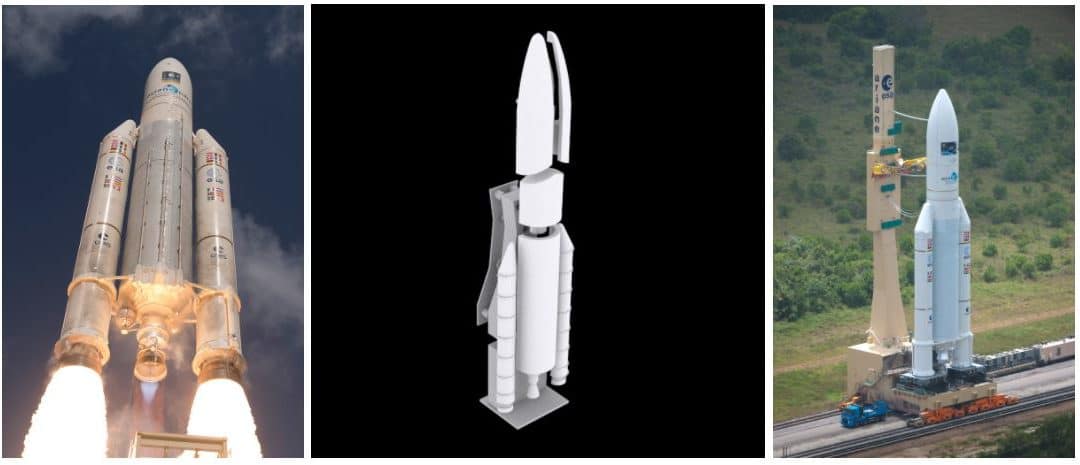
Ariane 5 Rocket Physical Simulator
As part of our strong commitment to education and scientific dissemination, we have designed a physical simulator and demonstrator of the legendary Ariane 5 rocket. The model is interactive and shows the different stages of the rocket, it's perfect to be used in...
TBT Telescope Robotic Scale Model
We have recently created a fully functional scale model of a TBT telescope, that can be controlled with your phone. Within ESA's SSA and GSTP programmes the TBT project was born in 2012 to detect and keep track on NEOs. ESA (European Space Agency) is one of the...
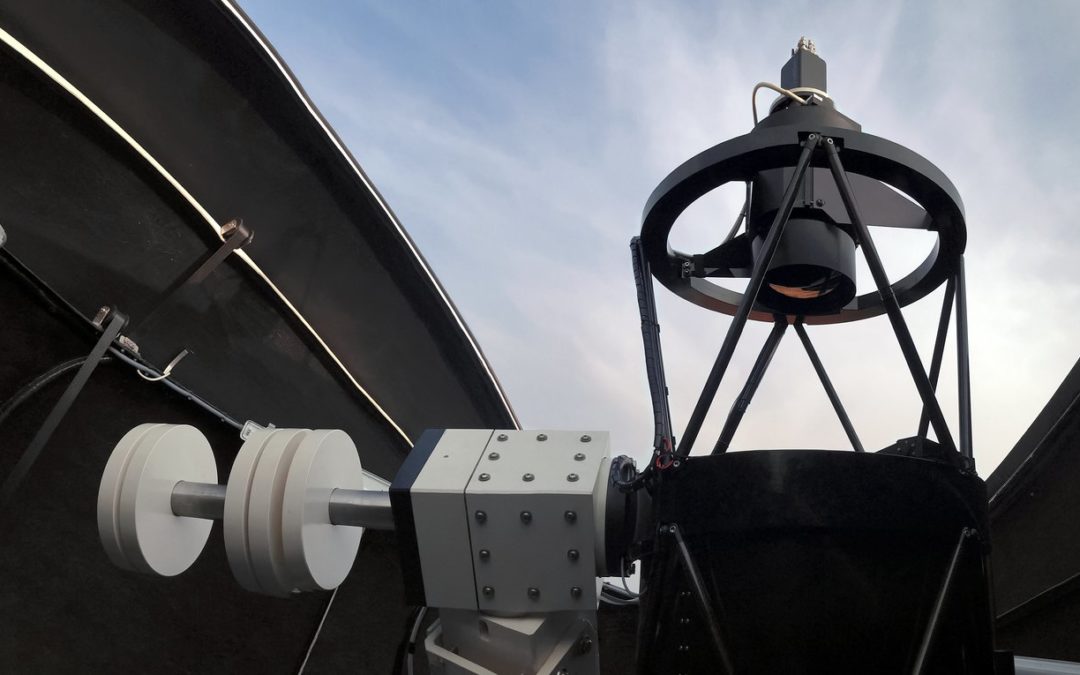
Observatory Security Robotic Installation
We have recently designed and successfully installed a security system for an astronomical observatory. Security installations are crucial for amateur and professional observatories. The telescope and all the equipment must be weather resistant as well as prepared...
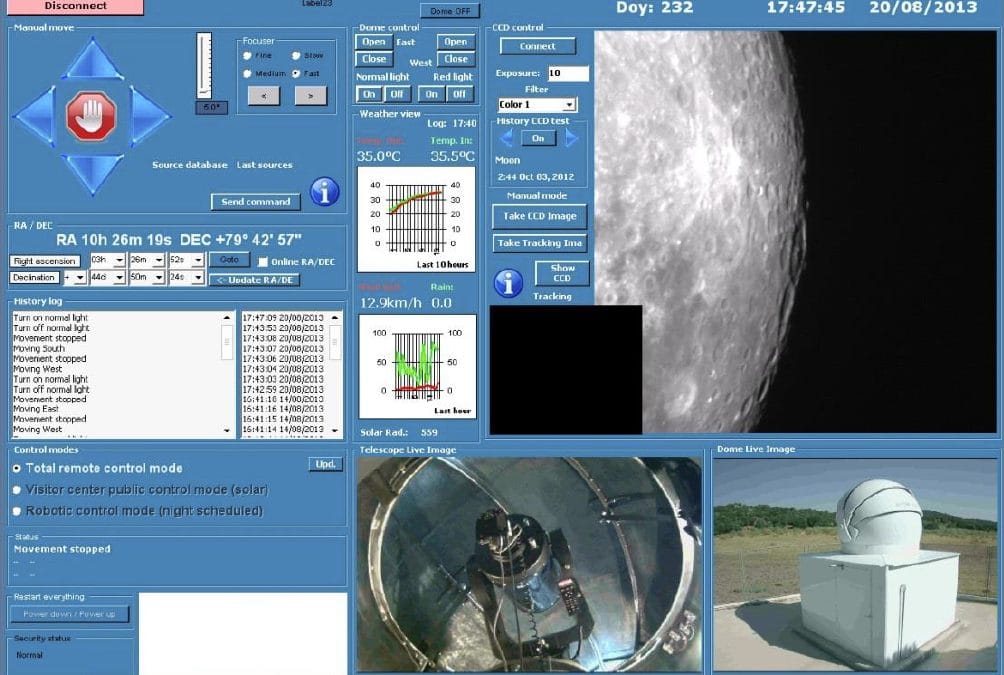
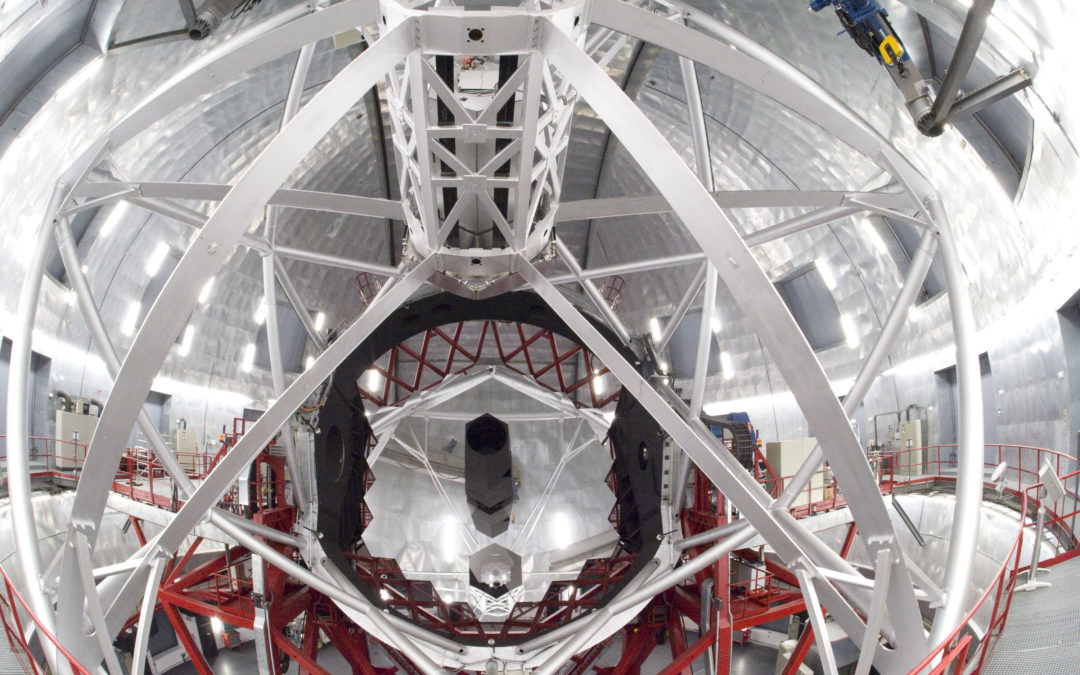
Robotic Telescope Installation and Software Design
We have installed a robotic telescope from scratch at NASA's Madrid Deep Space Communications Complex (MDSCC). The telescope can already be remote-controlled during observations and it will be fully-automatic at some point in the future. The new drivers are controled...

Installation of the first ever telescope in Boadilla del Monte
We have designed from scratch and successfully installed the first ever observatory in Boadilla del Monte. This includes sketches and blueprints, home-made pieces, tailor-made solutions, full installation, control software design and implementation, security...