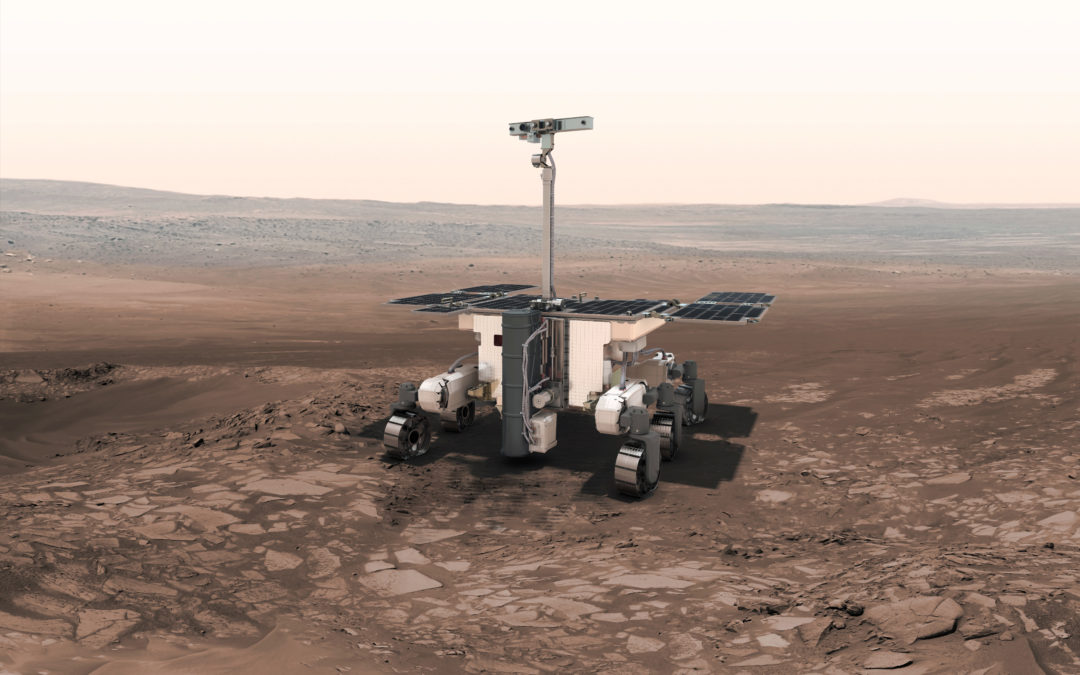
ExoMars 2020 won’t be launched until… guess it… 2020, but missions are always designed years before the launching date, so ExoMars’ 2020 Rover’s final design has already been presented. Although we already had figures from previous sketches, we rushed on to create the first available scaled model of the rover’s latest and final design.
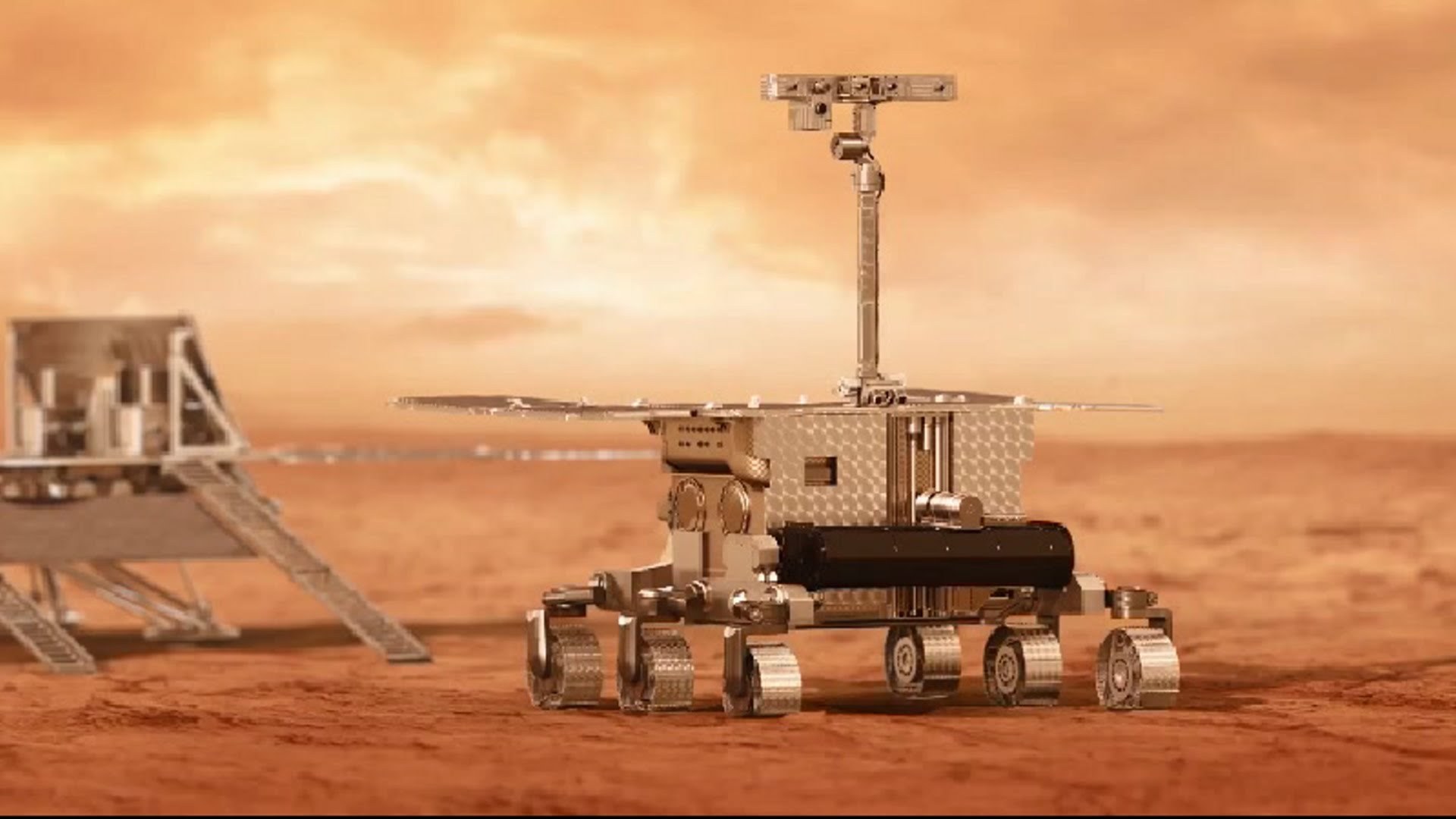
 ExoMars 2020 will deliver a rover and a surface platform to our neighbour planet. Like in the previous ExoMars mission, a Russian Proton rocket, formally known as UR-500, has been selected to launch the mission on a, for now, undetermined date in 2020. If conducted without incidents, the launching will lead to a nine-month interplanetary journey towards Mars. During this phase, a carrier module will transport the surface platform and the rover within a single aeroshell. Once in Mars, the descent module will separate from the carrier, and a parachute deployment sequence followed by a shorter propulsive braking phase will land the mission on either Mawrth Vallis or Oxia Planum, the final two candidates for the ExoMars 2020 mission landing site. During the descent phase, a heat shield will protect the payload from the severe heat flux and damping systems will soft the final contact. After landing, the rover will egress from the platform and both will start their missions.
ExoMars 2020 will deliver a rover and a surface platform to our neighbour planet. Like in the previous ExoMars mission, a Russian Proton rocket, formally known as UR-500, has been selected to launch the mission on a, for now, undetermined date in 2020. If conducted without incidents, the launching will lead to a nine-month interplanetary journey towards Mars. During this phase, a carrier module will transport the surface platform and the rover within a single aeroshell. Once in Mars, the descent module will separate from the carrier, and a parachute deployment sequence followed by a shorter propulsive braking phase will land the mission on either Mawrth Vallis or Oxia Planum, the final two candidates for the ExoMars 2020 mission landing site. During the descent phase, a heat shield will protect the payload from the severe heat flux and damping systems will soft the final contact. After landing, the rover will egress from the platform and both will start their missions.
 Exomars 2020 is the second and final mission of the ExoMars programme, the first one being ExoMars 2016. The ExoMars 2016 spacecraft consisted of the Trace Gas Orbiter (TGO) and the Schiaparelli EDM (Entry, Descent and Landing Demonstrator Module). TGO’s key goal was to gain a better understanding of methane and other atmospheric gases that could be evidence for possible biological or geological activity. The satellite is still orbiting Mars fully operational and its high-gain antenna will be used to support communications between ExoMars 2020 and ground stations on Earth. Schiaparelli was meant to test ESA’s entry, descent, and landing capabilities. Unfortunately, the landing went wrong in the final phase and Schiaparelli crashed into the surface, but the telemetry of the descent was successfully sent and it has helped to improve future landing systems such as the one being used in ExoMars 2020. ExoMars 2016 was led by the European Space Agency (ESA) in cooperation with Roscosmos, the Russian space agency, which provided the launch vehicle. On the other hand, the ExoMars 2020 spacecraft will consist of a Rover and a landing platform. In this second endeavour, Roscosmos has taken a step forward as besides providing the launching vehicle they are fully in charge of the landing platform’s and the descent module’s design and of their consequent construction.
Exomars 2020 is the second and final mission of the ExoMars programme, the first one being ExoMars 2016. The ExoMars 2016 spacecraft consisted of the Trace Gas Orbiter (TGO) and the Schiaparelli EDM (Entry, Descent and Landing Demonstrator Module). TGO’s key goal was to gain a better understanding of methane and other atmospheric gases that could be evidence for possible biological or geological activity. The satellite is still orbiting Mars fully operational and its high-gain antenna will be used to support communications between ExoMars 2020 and ground stations on Earth. Schiaparelli was meant to test ESA’s entry, descent, and landing capabilities. Unfortunately, the landing went wrong in the final phase and Schiaparelli crashed into the surface, but the telemetry of the descent was successfully sent and it has helped to improve future landing systems such as the one being used in ExoMars 2020. ExoMars 2016 was led by the European Space Agency (ESA) in cooperation with Roscosmos, the Russian space agency, which provided the launch vehicle. On the other hand, the ExoMars 2020 spacecraft will consist of a Rover and a landing platform. In this second endeavour, Roscosmos has taken a step forward as besides providing the launching vehicle they are fully in charge of the landing platform’s and the descent module’s design and of their consequent construction.
 The ExoMars rover will travel several kilometres across the Martian surface to search for signs of life. The possible landing sites have been selected with this mission in mind, and they are thought to have the potential for finding well-preserved organic material in them, particularly from the very early history of the planet. The rover will collect some of this material with a drill, which is designed to extract samples from various depths, down to a maximum of two meters. This is important because due to the little protection that the tenuous Martian atmosphere offers from radiation and photochemistry, the possible organical remainings will have been better preserved under the surface, thus, underground samples are more likely to include biomarkers.
The ExoMars rover will travel several kilometres across the Martian surface to search for signs of life. The possible landing sites have been selected with this mission in mind, and they are thought to have the potential for finding well-preserved organic material in them, particularly from the very early history of the planet. The rover will collect some of this material with a drill, which is designed to extract samples from various depths, down to a maximum of two meters. This is important because due to the little protection that the tenuous Martian atmosphere offers from radiation and photochemistry, the possible organical remainings will have been better preserved under the surface, thus, underground samples are more likely to include biomarkers.
The rover is essentially a laboratory on wheels: once collected, a sample is delivered to the rover’s analytical laboratory, here, they are analyzed in-situ with next-generation instruments that should determine the soil composition and identificate the presence of different substances such as minerals, organic substances, and biomarkers.
 2020 ExoMar’s Rover relies on a science payload of nine instruments conceived either for the targeting or analysis of samples: PanCam (The Panoramic Camera), that will perform digital terrain mapping of Mars and look for possible sample’s location. WISDOM (Water Ice and Subsurface Deposit Observation On Mars), a ground-penetrating radar to characterize the stratigraphy under the rover and decide where to collect subsurface samples for analysis. Adron, to search for subsurface water and hydrated minerals under the subsurface beneath the rover and therefore select suitable areas for drilling and sample collection. ISEM (Infrared Spectrometer for ExoMars), which will assess the mineralogical composition of surface targets and select suitable samples for further analysis by the other instruments. CLUPI (CLoseUP Imager) will acquire high-resolution colour close-up images of rocks, outcrops, drill fines and drill core samples. Ma_MISS (Mars Multispectral Imager for Subsurface Studies) will contribute to the study of the Martian mineralogy and rock formation. MicrOmega, a visible and infrared imaging spectrometer for mineralogy studies on Martian samples. MOMA (Mars Organic Molecule Analyser), that will target biomarkers to answer questions related to the potential origin, evolution, and distribution of life on Mars. RLS (Raman Laser Spectrometer), whose database we designed, which will establish the mineralogical composition of the samples and identify organic pigments.
2020 ExoMar’s Rover relies on a science payload of nine instruments conceived either for the targeting or analysis of samples: PanCam (The Panoramic Camera), that will perform digital terrain mapping of Mars and look for possible sample’s location. WISDOM (Water Ice and Subsurface Deposit Observation On Mars), a ground-penetrating radar to characterize the stratigraphy under the rover and decide where to collect subsurface samples for analysis. Adron, to search for subsurface water and hydrated minerals under the subsurface beneath the rover and therefore select suitable areas for drilling and sample collection. ISEM (Infrared Spectrometer for ExoMars), which will assess the mineralogical composition of surface targets and select suitable samples for further analysis by the other instruments. CLUPI (CLoseUP Imager) will acquire high-resolution colour close-up images of rocks, outcrops, drill fines and drill core samples. Ma_MISS (Mars Multispectral Imager for Subsurface Studies) will contribute to the study of the Martian mineralogy and rock formation. MicrOmega, a visible and infrared imaging spectrometer for mineralogy studies on Martian samples. MOMA (Mars Organic Molecule Analyser), that will target biomarkers to answer questions related to the potential origin, evolution, and distribution of life on Mars. RLS (Raman Laser Spectrometer), whose database we designed, which will establish the mineralogical composition of the samples and identify organic pigments.
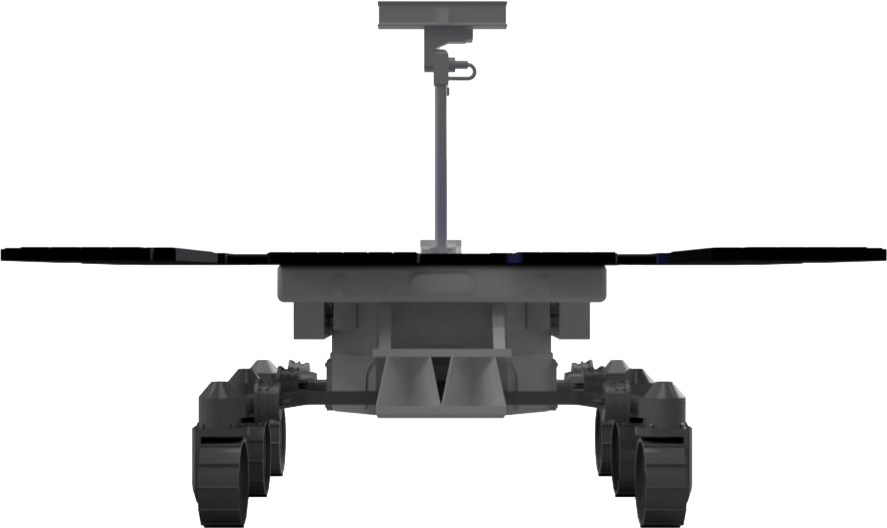
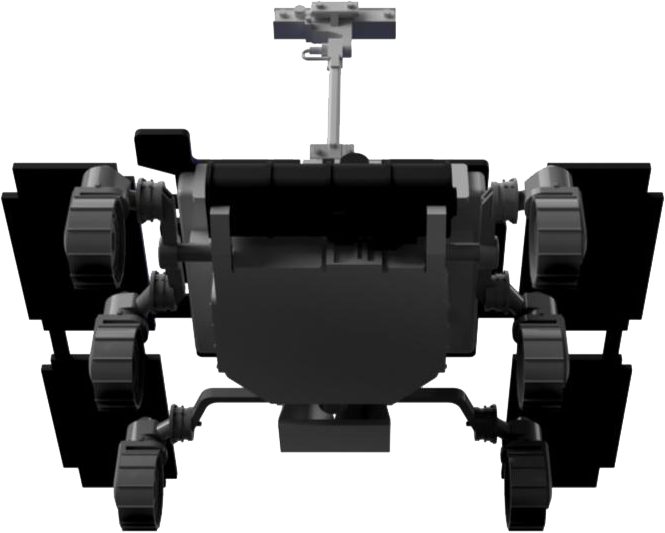
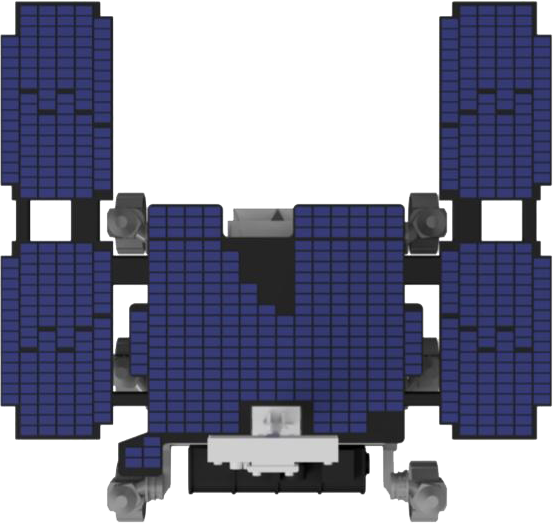
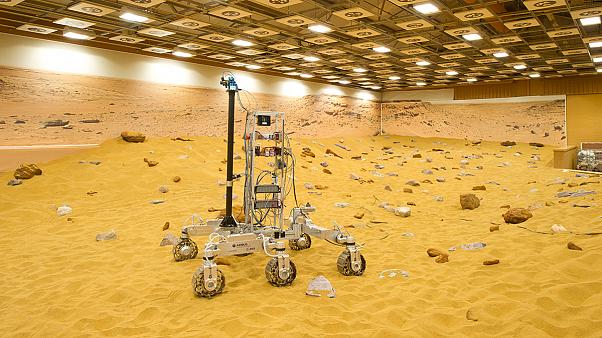
Of course, building a rover is not about putting nine instruments into a six-wheel electric car. The thing has to perfectly work as a whole. Many sketches and prototypes are created and discarded in the process of designing the vehicle (a scaled model of one of them can be seen at the bottom), and after a long testing and deliberation process, only one remains. Although we already had figures from previous sketches, once the final configuration was confirmed we rushed on to create the first available scaled model of the rover’s latest design. As always, our 3D model displays all the elements of the original vehicle and is as detailed as it can be. The 3D archive can be displayed in 360º through HTML or 3D-printed with an excellent-quality guarantee, as it was designed from scratch to assure compatibility with this printing technique.
Cover Image © ESA