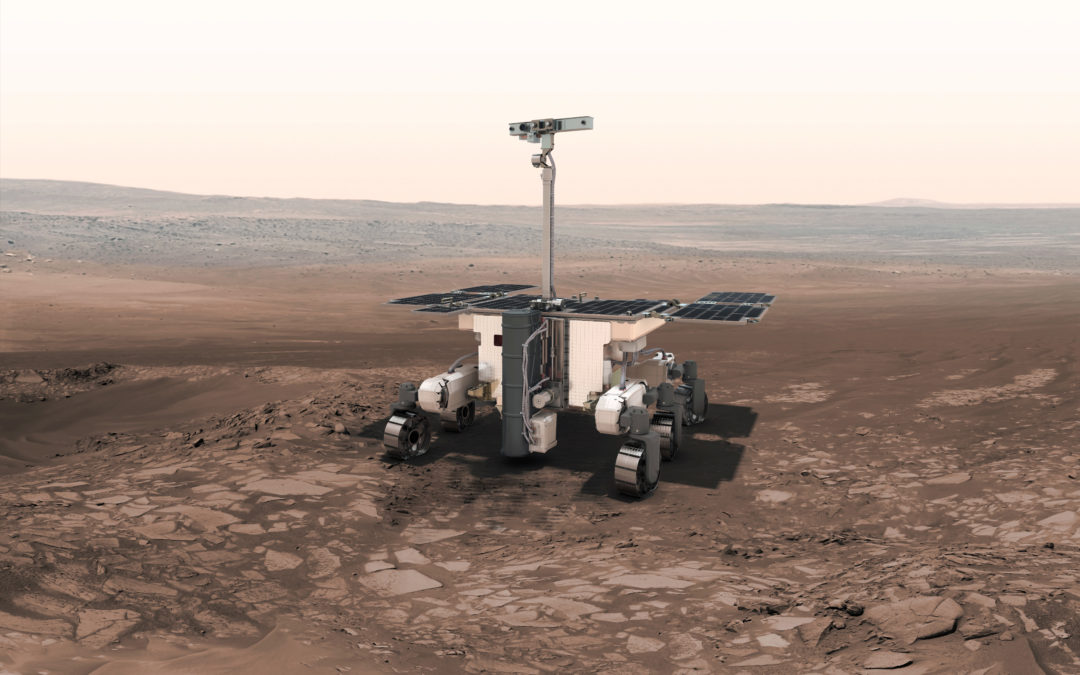
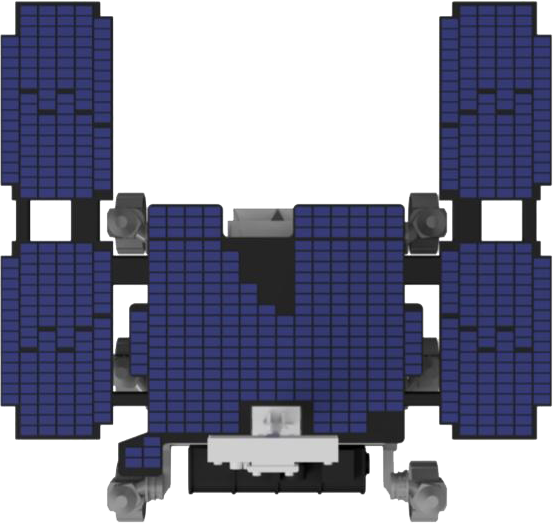
ExoMars 2020 no se lanzará hasta… bueno… hasta 2020, pero las misiones siempre terminan de diseñarse años antes de su fecha de lanzamiento, por lo que el diseño final del Rover de ExoMars 2020 ya ha sido presentado. Aunque teníamos figuras de algunos bocetos anteriores nos apresuramos a crear el primer modelo disponible basado en el último y definitivo diseño del rover.
 ExoMars 2020 llevará un rover y una plataforma de superficie a nuestro planeta vecino. Igual que en la anterior misión de ExoMars, se ha escogido un cohete Proton ruso formalmente conocido como UR-500 para realizar el lanzamiento; que tendrá lugar a lo largo del 2020 en una fecha aún indeterminada. Tras el lanzamiento tendrá lugar un viaje interplanetario de nueve meses hacia Marte; durante esta fase, un módulo portador transportará la plataforma de superficie y el rover dentro de un único carenado protector. Una vez en Marte, el módulo de descenso se separará del portador, y una compleja secuencia de despliegue de paracaídas seguida de la breve fase de frenado por retropropulsión aterrizará el equipo en Mawrth Vallis u Oxia Planum, los dos candidatos finales como lugares de aterrizaje. Después de aterrizar, el rover saldrá de la plataforma y ambos comenzarán sus respectivas misiones.
ExoMars 2020 llevará un rover y una plataforma de superficie a nuestro planeta vecino. Igual que en la anterior misión de ExoMars, se ha escogido un cohete Proton ruso formalmente conocido como UR-500 para realizar el lanzamiento; que tendrá lugar a lo largo del 2020 en una fecha aún indeterminada. Tras el lanzamiento tendrá lugar un viaje interplanetario de nueve meses hacia Marte; durante esta fase, un módulo portador transportará la plataforma de superficie y el rover dentro de un único carenado protector. Una vez en Marte, el módulo de descenso se separará del portador, y una compleja secuencia de despliegue de paracaídas seguida de la breve fase de frenado por retropropulsión aterrizará el equipo en Mawrth Vallis u Oxia Planum, los dos candidatos finales como lugares de aterrizaje. Después de aterrizar, el rover saldrá de la plataforma y ambos comenzarán sus respectivas misiones.
 Exomars 2020 es la segunda y última misión del programa ExoMars. La primera fue ExoMars 2016, que consistía en el Orbitador para Trazas de Gas (TGO) y Schiaparelli EDM (Módulo demostrador de Entrada, Descenso y aterrizaje). El objetivo principal de TGO era desentrañar los misterios que esconden el metano y otros gases atmosféricos que podrían ser indicadores de una posible actividad biológica o geológica en el planeta. El satélite está en pleno funcionamiento y mantiene su órbita alrededor de Marte, de hecho, su antena de alta ganancia se utilizará para establecer comunicaciones con ExoMars 2020. Schiaparelli, por su parte, estaba destinada a evaluar las capacidades de entrada, descenso y aterrizaje de la ESA. El aterrizaje falló en la fase final, pero la telemetría del descenso se envió con éxito y ha ayudado a mejorar los sistemas de aterrizaje futuros como el que se utilizará en ExoMars 2020. ExoMars 2016 fue un programa dirigido por la Agencia Espacial Europea (ESA) en cooperación con Roscosmos, la agencia espacial rusa, que proporcionó el vehículo de lanzamiento. En esta segunda aventura (ExoMars 2020), Roscosmos ha dado un paso adelante, ya que además de proporcionar el vehículo de lanzamiento, está a cargo del diseño y construcción del módulo de descenso y la plataforma de aterrizaje.
Exomars 2020 es la segunda y última misión del programa ExoMars. La primera fue ExoMars 2016, que consistía en el Orbitador para Trazas de Gas (TGO) y Schiaparelli EDM (Módulo demostrador de Entrada, Descenso y aterrizaje). El objetivo principal de TGO era desentrañar los misterios que esconden el metano y otros gases atmosféricos que podrían ser indicadores de una posible actividad biológica o geológica en el planeta. El satélite está en pleno funcionamiento y mantiene su órbita alrededor de Marte, de hecho, su antena de alta ganancia se utilizará para establecer comunicaciones con ExoMars 2020. Schiaparelli, por su parte, estaba destinada a evaluar las capacidades de entrada, descenso y aterrizaje de la ESA. El aterrizaje falló en la fase final, pero la telemetría del descenso se envió con éxito y ha ayudado a mejorar los sistemas de aterrizaje futuros como el que se utilizará en ExoMars 2020. ExoMars 2016 fue un programa dirigido por la Agencia Espacial Europea (ESA) en cooperación con Roscosmos, la agencia espacial rusa, que proporcionó el vehículo de lanzamiento. En esta segunda aventura (ExoMars 2020), Roscosmos ha dado un paso adelante, ya que además de proporcionar el vehículo de lanzamiento, está a cargo del diseño y construcción del módulo de descenso y la plataforma de aterrizaje.
 El rover ExoMars viajará varios kilómetros por la superficie marciana en busca de signos de vida. Los posibles lugares de aterrizage han sido considerados con esta misión en mente, y se cree que tienen potencial de albergar material orgánico bien conservado datado en la prehistoria del planeta. El rover recogerá parte de este material con un taladro expresamente diseñado para extraer muestras de diversas profundidades hasta un máximo de dos metros. Esto es importante debido a que la poca protección que ofrece la tenue atmósfera marciana frente a la radiación diezma la durabilidad de las estructuras moleculares, y por lo tanto, los posibles restos orgánicos se habrán conservado mejor bajo la superficie y las muestras subterráneas tendrán más probabilidades de incluir biomarcadores.
El rover ExoMars viajará varios kilómetros por la superficie marciana en busca de signos de vida. Los posibles lugares de aterrizage han sido considerados con esta misión en mente, y se cree que tienen potencial de albergar material orgánico bien conservado datado en la prehistoria del planeta. El rover recogerá parte de este material con un taladro expresamente diseñado para extraer muestras de diversas profundidades hasta un máximo de dos metros. Esto es importante debido a que la poca protección que ofrece la tenue atmósfera marciana frente a la radiación diezma la durabilidad de las estructuras moleculares, y por lo tanto, los posibles restos orgánicos se habrán conservado mejor bajo la superficie y las muestras subterráneas tendrán más probabilidades de incluir biomarcadores.
El rover es básicamente un laboratorio sobre ruedas: una vez recolectadas, las muestras se entregan al laboratorio analítico interno donde son analizadas in situ con instrumentos de última generación que deberían determinar la composición del suelo e identificar la presencia de diferentes sustancias como minerales, sustancias orgánicas y biomarcadores.
 El cargamento científico del Rover ExoMars 2020 suma un total de nueve instrumentos concebidos bien para la detección o para el análisis de muestras: PanCam (Cámara Panorámica), que realizará un mapeo digital del terreno de Marte y localizará posibles muestras. WISDOM (Observación de Depósitos de Agua Helada y del Subsuelo en Marte), un radar que penetra en el suelo para caracterizar la estratigrafía bajo el rover y decidir dónde recolectar muestras para su análisis. Adron, para buscar agua subterránea y minerales hidratados bajo la subsuperficie sobre la que se encuentre el rover y seleccionar áreas adecuadas para perforación y recolección de muestras. ISEM (Espectrómetro Infrarrojo para ExoMars), que evaluará la composición mineralógica de los posibles objetivos en la superficie y seleccionará los más adecuados para su posterior análisis mediante otros instrumentos. CLUPI (cámara de cerca), que fotofrafiará primeros planos en color y alta resolución de los elementos recogidos en la perforación. Ma_MISS (Cámara Multiespectral para Estudios Subterraneos en Marte), que contribuirá al estudio de la mineralogía marciana y de las formaciones rocosas. MicrOmega, un espectrómetro visible e infrarrojo para estudios de mineralogía en las muestras. MOMA (Analizador de Moléculas Orgánicas de Marte), que se buscará biomarcadores en las muestras para responder a las preguntas relacionadas con el posible origen, evolución y distribución de la vida en Marte. Y el RLS (Raman Laser Spectrometer), cuya base de datos hemos diseñado, que establecerá la composición mineralógica de las muestras e identificará los pigmentos orgánicos.
El cargamento científico del Rover ExoMars 2020 suma un total de nueve instrumentos concebidos bien para la detección o para el análisis de muestras: PanCam (Cámara Panorámica), que realizará un mapeo digital del terreno de Marte y localizará posibles muestras. WISDOM (Observación de Depósitos de Agua Helada y del Subsuelo en Marte), un radar que penetra en el suelo para caracterizar la estratigrafía bajo el rover y decidir dónde recolectar muestras para su análisis. Adron, para buscar agua subterránea y minerales hidratados bajo la subsuperficie sobre la que se encuentre el rover y seleccionar áreas adecuadas para perforación y recolección de muestras. ISEM (Espectrómetro Infrarrojo para ExoMars), que evaluará la composición mineralógica de los posibles objetivos en la superficie y seleccionará los más adecuados para su posterior análisis mediante otros instrumentos. CLUPI (cámara de cerca), que fotofrafiará primeros planos en color y alta resolución de los elementos recogidos en la perforación. Ma_MISS (Cámara Multiespectral para Estudios Subterraneos en Marte), que contribuirá al estudio de la mineralogía marciana y de las formaciones rocosas. MicrOmega, un espectrómetro visible e infrarrojo para estudios de mineralogía en las muestras. MOMA (Analizador de Moléculas Orgánicas de Marte), que se buscará biomarcadores en las muestras para responder a las preguntas relacionadas con el posible origen, evolución y distribución de la vida en Marte. Y el RLS (Raman Laser Spectrometer), cuya base de datos hemos diseñado, que establecerá la composición mineralógica de las muestras e identificará los pigmentos orgánicos.
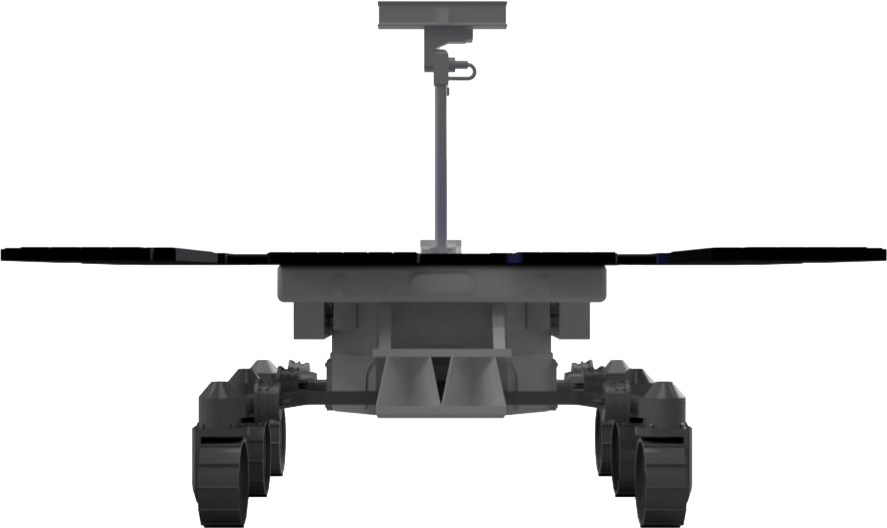
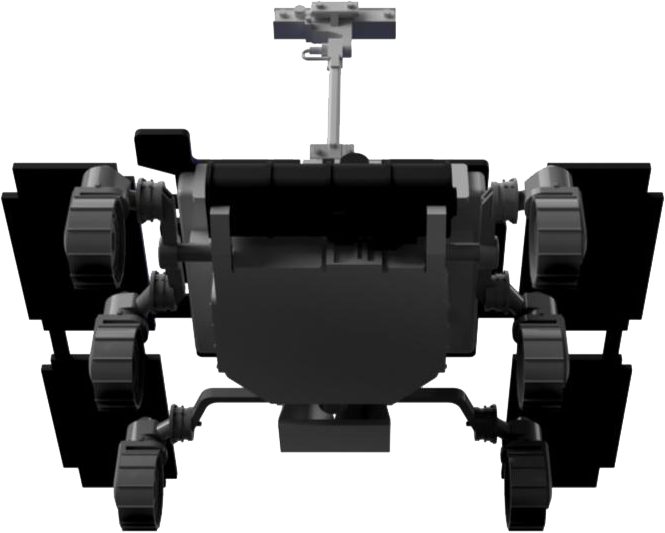
Por supuesto, construir un rover no consiste en poner nueve instrumentos en un coche eléctrico de seis ruedas. El sistema debe funcionar perfectamente cohesionado como un todo. Se crean y descartan muchos bocetos y prototipos en el proceso de diseño (en la parte inferior se puede ver un modelo a escala de uno de ellos) hasta que, después de un largo proceso de pruebas y deliberaciones, solo queda uno. A pesar de que ya teníamos figuras de algunos bocetos anteriores, una vez que se confirmó la configuración final nos apresuramos a crear el primer modelo disponible del último diseño del rover. Como siempre, nuestro modelo 3D muestra todos los elementos del vehículo original y es todo lo detallado que puede ser. El archivo 3D se puede mostrar en 360º a través de HTML o puede imprimirse en 3D con garantía de excelente calidad, ya que siguiendo nuestro flujo de trabajo habitual, ha sido diseñado desde cero para garantizar la compatibilidad con esta técnica de impresión.
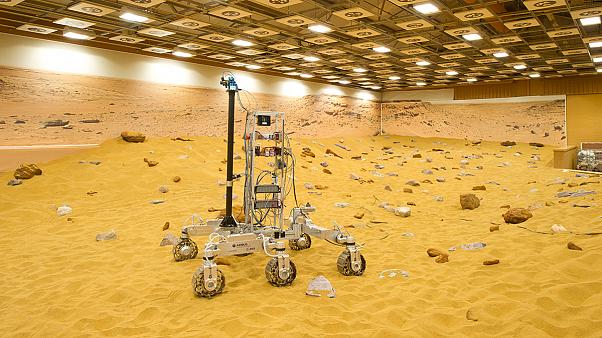
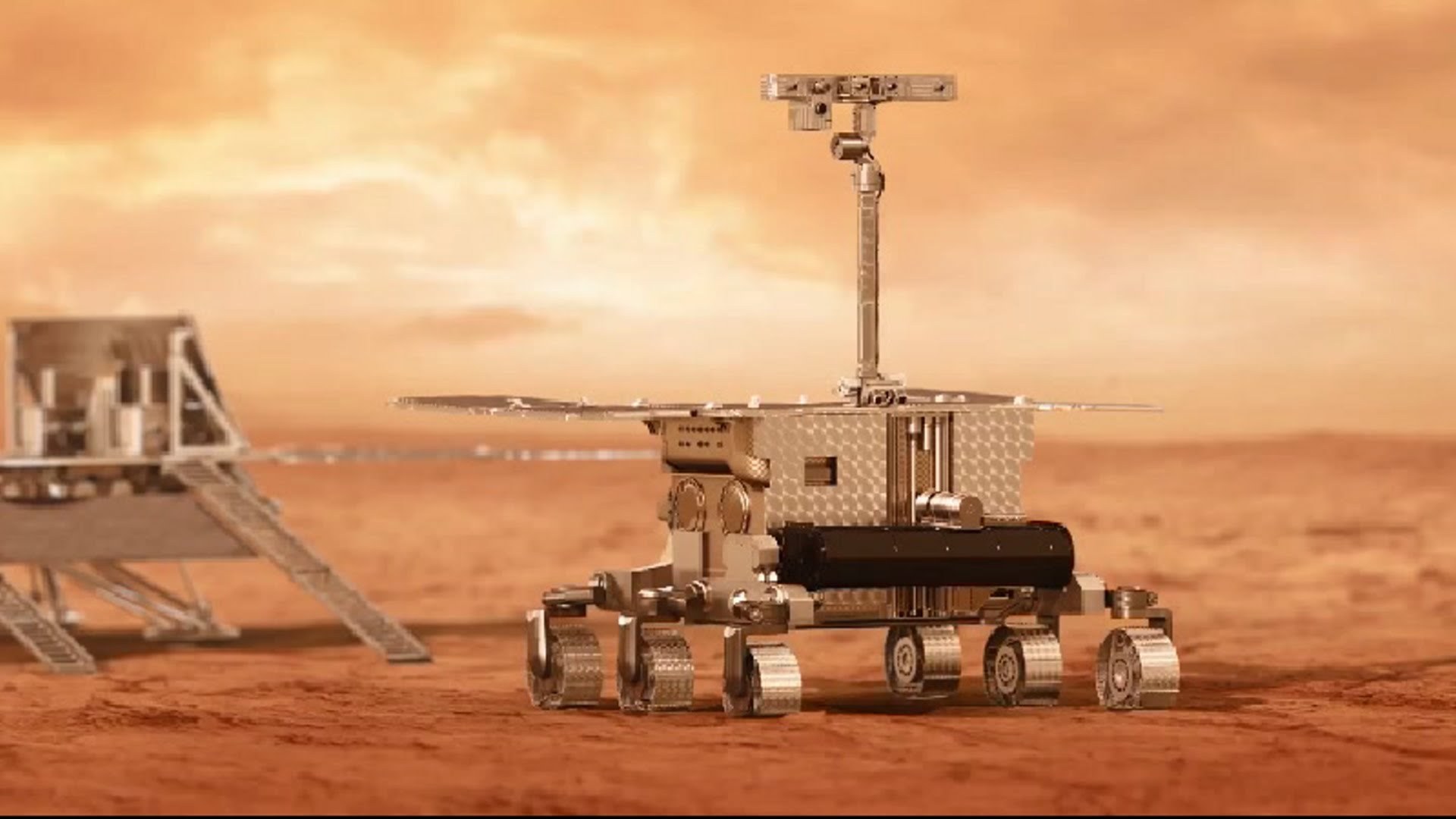
Imagen de Portada © ESA