
La Agencia Espacial Europea (ESA) lanzará en 2022 el explorador robótico Rosalind Franklin hacia Marte. Mientras la exploración de Marte se prepara para un renacimiento, el rover europeo afina su equipo para los desafíos que se avecinan.
ExoMars 2022 llevará un rover y una plataforma de superficie a nuestro planeta vecino. Igual que en la anterior misión de ExoMars, se ha escogido un cohete Proton ruso formalmente conocido como UR-500 para realizar el lanzamiento; que tendrá lugar a lo largo del 2020 en una fecha aún indeterminada. Tras el lanzamiento tendrá lugar un viaje interplanetario de nueve meses hacia Marte; durante esta fase, un módulo portador transportará la plataforma de superficie y el rover dentro de un único carenado protector. Una vez en Marte, el módulo de descenso se separará del portador, y una compleja secuencia de despliegue de paracaídas seguida de la breve fase de frenado por retropropulsión aterrizará el equipo en Mawrth Vallis u Oxia Planum, los dos candidatos finales como lugares de aterrizaje. Después de aterrizar, el rover saldrá de la plataforma y ambos comenzarán sus respectivas misiones.
El rover de la ESA perforará hasta dos metros en la superficie marciana para tomar muestras de su suelo, analizar su composición y buscar evidencia de vida enterrada bajo su superficie.
Raman-LIBS (instrumento creado en España por el INTA-CSIC)
El vehículo Rosalind Franklin consiste un vehículo que contiene, entre sus instrumentos, el Espectrómetro Láser Raman (RLS), que ha sido desarrollado por un equipo encabezado por miembros del Centro de Astrobiología (CAB, INTA-CSIC).
En el caso del RLS, se analizan las muestras en polvo, en la escala mineral de grano, identificando las fases minerales presentes y también en busca de posibles trazas de compuestos orgánicos, uno de los propósitos principales de la misión ExoMars. Además de buscar signos de vida pasada y presente en Marte, otros objetivos de la misión ExoMars son caracterizar el ambiente geoquímico (o acuoso) en función de la profundidad en el subsuelo; estudiar la superficie del planeta rojo e identificar los peligros para futuras misiones humanas; e investigar el subsuelo marciano para comprender mejor la evolución y la habitabilidad de Marte. Por tanto, “el instrumento Raman abordará aspectos clave de la misión”.
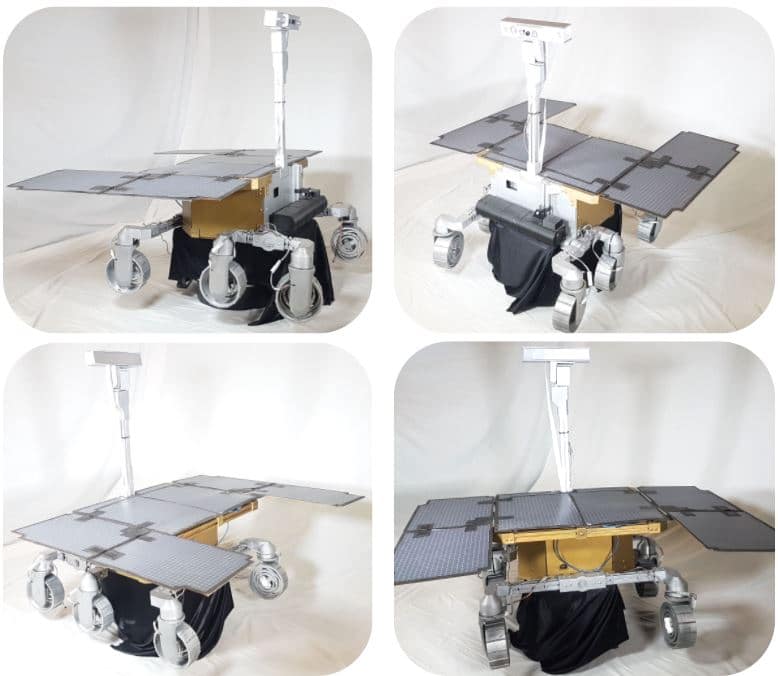
Sobre el modelo robótico a escala 1:2 y última actualización COVID
El rover fue expuesto durante el ESA Open Day en Madrid en el Centro Europeo de Astronomía Espacial (ESA/ESAC). Se controló a distancia gracias a señal de radio, haciendo una demostración de cómo se controlaría el ExoMars Rover por radio usando la GroundStation de Satélites.
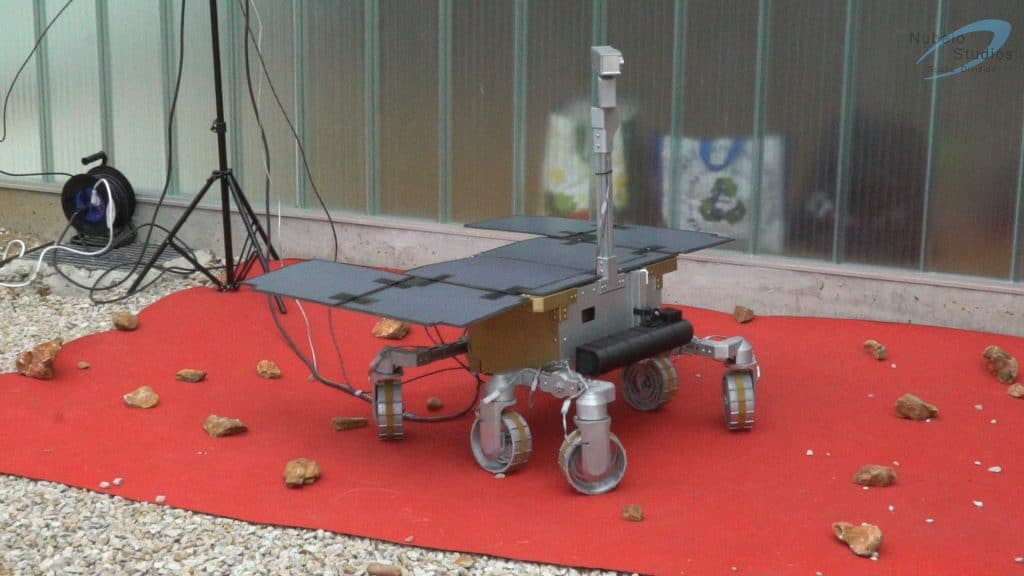
Aparte del control a distancia los usuarios que se acercaban al escenario también podían mover el rover de forma manual con una sencilla interfaz para mover el rover de posición, la cámara, etc.
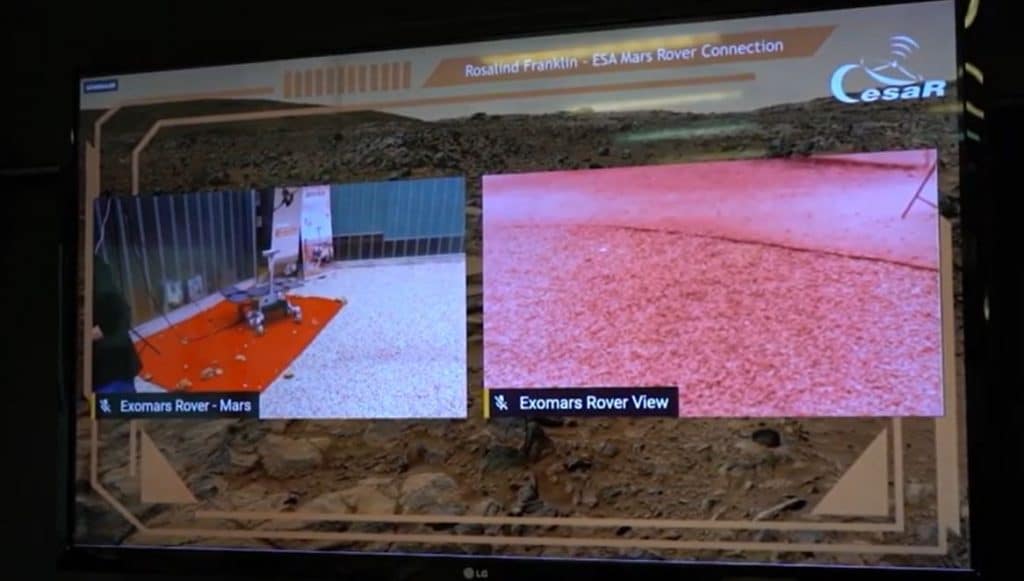
La última actualización realizada para eventos durante la pandemia ha permitido el control del rover para demostraciones online (Semana de la Ciencia, Noche de los Investigadores y Space Summer School), donde los diferentes usuarios podían mandar órdenes al rover directamente desde sus casas a través de una serie de comandos cuando se les daba acceso.
Los instrumentos de medición del rover se resumían en visualización y control de la cámara frontal, medición de temperatura y humedad.