Robótica Espacial
Robótica espacial diseñada para trabajar en órbita o en la superficie de otros planetas.
Un robot es una máquina capaz de ejecutar tareas complejas de forma automática. Cada robot está específicamente diseñado para realizar una o más tareas en concreto. Los robots pueden ser controlados por un ser humano a través de un dispositivo de control, por un ordenador al que estén conectados, o pueden ser completamente autónomos y decidir por sí mismos cuándo hacer qué. Los robots autónomos pueden incluso aprender cada vez que realizan una acción.
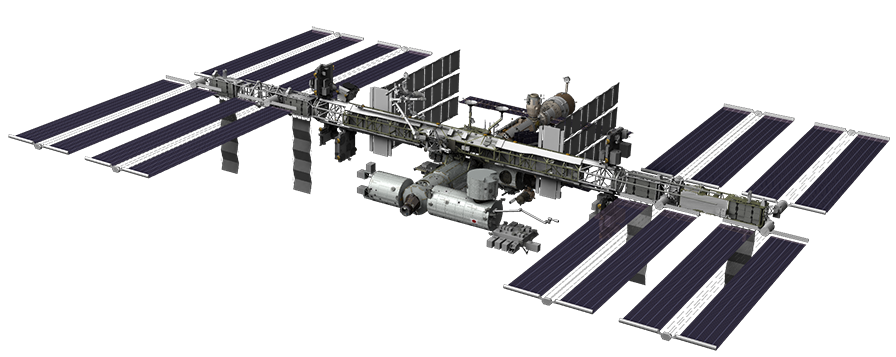
Probablemente la exploración espacial sea el campo de estudio donde el rol de la robótica tiene mayor importancia. Ningún humano ha ido jamás más allá de la Luna, y aun así, gracias a la Robótica Espacial, miles de científicos han explorado Marte, un planeta a millones de kilómetros de distancia de cualquier lugar donde un humano haya estado jamás. E incluso cuando el ser humano ha estado explorando el espacio en persona, como en la Luna o en la Estación Espacial Internacional (ISS), la robótica espacial estaba ahí, allanando el camino.
La Robótica Espacial tiene, principalmente, dos áreas de interés: robótica orbital, rovers y aterrizadores planetarios. La robótica orbital está especializada en tareas autónomas en escenarios sin gravedad, como las operaciones en la Estación Espacial Internacional (ISS) u operaciones de servicio en satélites. Los vehículos planetarios, por su parte, están diseñados para operar en la superficie de los planetas y lunas del Sistema Solar. Otros escenarios como la exploración de cometas y asteroides tienen entornos con baja gravedad que se encuentran entre las dos categorías.

Robótica Orbital
La industria espacial fabrica maquinaria extremadamente compleja y delicada, por esta razón, muchas tareas relacionadas con operaciones de servicio en satélites y las operaciones en la ISS no pueden ser hechas por humanos de forma fiable. Además, el espacio es un ambiente hostil, y estas tareas pueden ser peligrosas y no adecuadas para nosotros. Las soluciones robóticas son una buena opción para enfrentarse a estas situaciones complicadas. Además de las operaciones difíciles y arriesgadas, algunas tareas que deben realizarse en el espacio son exigentes y repetitivas, los robots también pueden ser muy útiles en estos casos.
Para la Robótica Orbital, el entorno espacial (sin gravedad, altos niveles de radiación, cambios térmicos extremos, etc.) plantea desafíos únicos para el diseño y la fabricación de estos robots. Cada parte, cada pieza, cada subsistema debe concebirse para sobrevivir y operar en el espacio. Y el desafío no termina aquí, el cerebro del robot, todo el software que controlará los movimientos y operaciones también tiene que estar especialmente diseñado para el espacio. A pesar de estos desafíos, en el espacio los robots se utilizan diariamente, y se espera que su importancia aumente durante los próximos años.

Además de las consideraciones habituales en el diseño de robots, como las fuentes de alimentación, interfaces de control, diseño electromecánico, etc. el sector de la robótica orbital tiene sus propias preocupaciones: como la locomoción en microgravedad, consideraciones térmicas, resistencia a la radiación y muchas otras. Por estas razones, es importante elegir cuidadosamente los materiales, las estructuras, los diseños y los protocolos apropiados para esta maquinaria tan específica.
Si está pensando en una posible solución de robótica orbital, considere contactarnos a través del formulario a pie de página y nuestro equipo de expertos estudiará las circunstancias de su caso y creará un robot, componente robótico o software robótico adecuado para usted.
Robótica Orbitál
Soluciones Robóticas para satélites y cubesats.
Rovers Planetarios
Robots y subsistemas robóticos diseñados para trabajar en otros planetas.
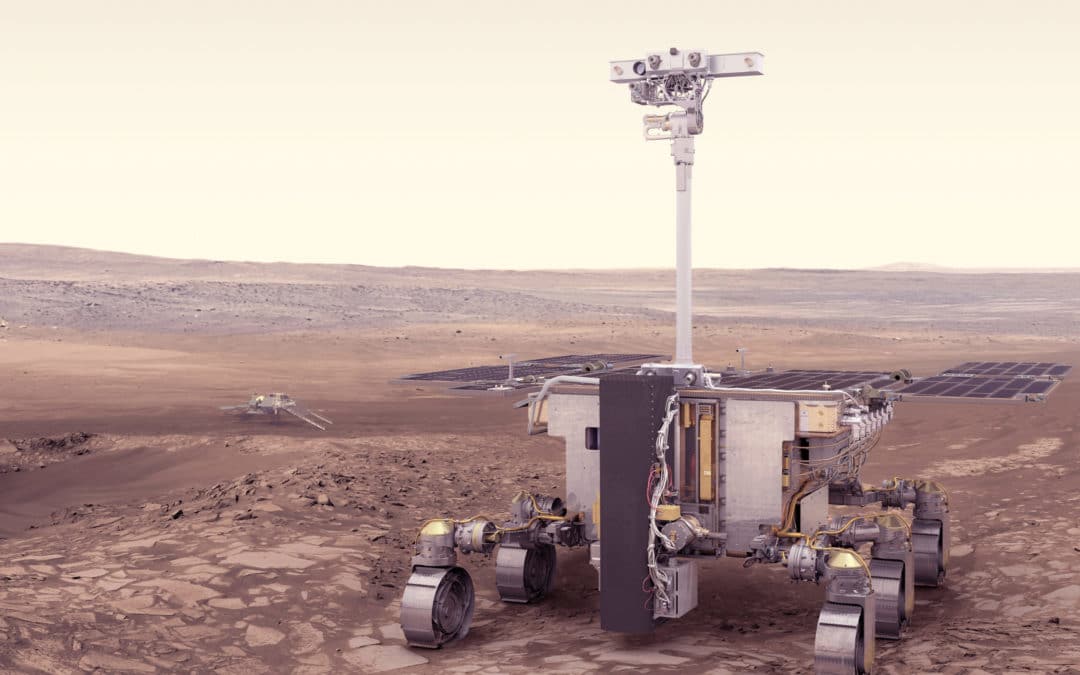
Rovers y Aterrizadores Planetarios
Al igual que el espacio, los planetas más allá de la Tierra también son entornos hostiles, y el envío de astronautas para explorarlos, ha sido, hasta la fecha, demasiado arriesgado. Una vez más, los robots son la mejor opción para superar este impedimento. Por ejemplo, casi todas las cosas que sabemos sobre Marte han sido descubiertas por Rovers Marcianos, que se mueven e investigan de forma autónoma en la superficie de este planeta.
Se prevé que se enviarán más Rovers en un futuro cercano para seguir explorando nuevos mundos, e incluso cuando estemos listos para enviar astronautas a otros planetas, la cooperación humano-robot será esencial para el éxito de estas misiones.
Los vehículos planetarios también presentan desafíos únicos: Los aterrizajes automáticos en otros planetas que no causen daños a la carga no son una tarea fácil. Y una vez en la superficie, el robot debe enfrentarse a condiciones climatológicas adversas en atmósferas impredecibles. Incluso con las mejores condiciones, siempre hay una gran incertidumbres al interactuar con un terreno inexplorado.
Preocupaciones importantes al diseñar vehículos planetarios incluyen:
- Percepción para la exploración planetaria, incluida la estimación precisa de la posición relativa al terreno.
- Movilidad planetaria sobre la superficie y subsuperficie, posiblemente a partir de nuevos conceptos de diseño de vehículos.
- Comando y control con ancho de banda limitado, que a menudo impide la teleoperación y requiere operaciones de superficie autónomas, con navegación y manipulación natural del terreno.
En SpaceRobotics.EU contamos con un equipo de expertos ingenieros, capaces de crear robots, componentes robóticos y soluciones de software robótico para operar en otros planetas. Además, tenemos una larga experiencia en la construcción de modelos a escala personalizados para probar prototipos de nuevas tecnologías y software en condiciones simuladas en la Tierra.

Solicita nuestros servicios
Rovers
Crea tu Rover
Drones y más
Partes mecánicas para el espacio
Software
El cerebro del Robot
Hardware
Control, Tierra – Espacio
Proceso básico de desarrollo
Idea
Propuesta Inicial
Análisis y Creación
Análisis general
Testing
Probamos el Prducto
%
Entrega

¡Trabaja con nosotros! Tenemos nuevos puestos disponibles en SpaceRobotics.EU
¿Te apasiona el espacio? ¿Te planteas trabajar con nosotros? Rellena el formulario con el puesto que te interesa y mándanos tu CV por e-mail. Nos pondremos en contacto contigo si alguno de los puestos se adecúa a tu perfil. Ahora mismo, estamos desarrollando nuevos...
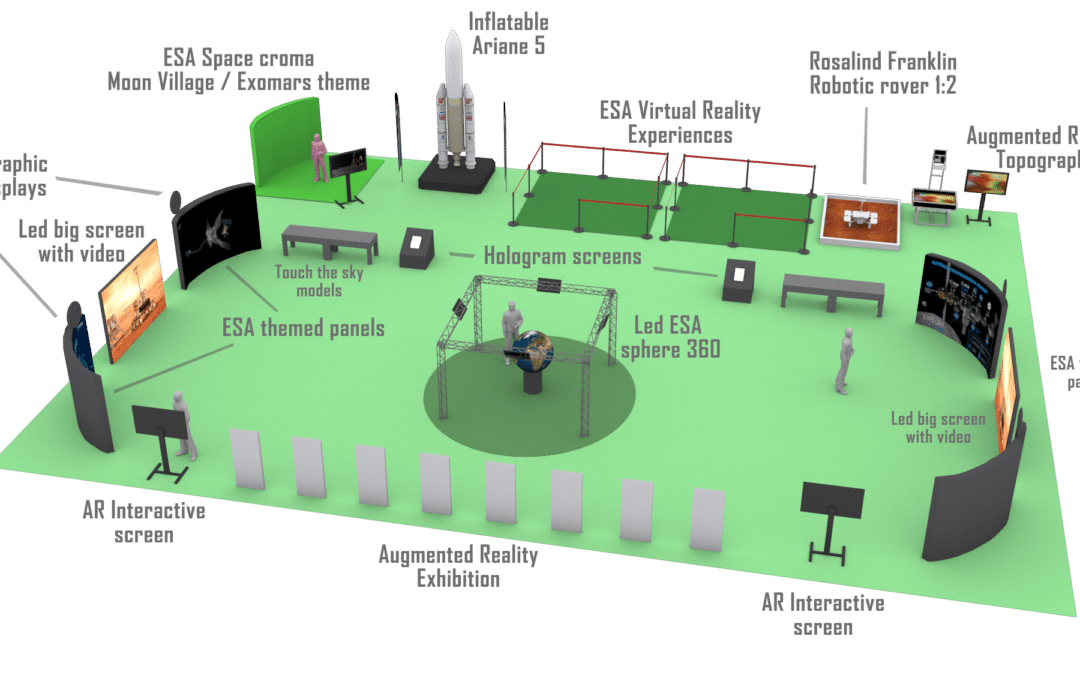
Exposiciones espaciales para museos y eventos
Creamos exposiciones profesionales a medida sobre el espacio en tiempo récord.
Contenido multimedia, módulos interactivos, experiencias de Realidad Virtual o Realidad Aumentada, pantallas led gigantes, son algunos de nuestros ejemplos para las exposiciones y ferias sobre el espacio.

Rosalind Franklin robótico v3
La Agencia Espacial Europea (ESA) lanzará en 2022 el explorador robótico Rosalind Franklin hacia Marte. Mientras la exploración de Marte se prepara para un renacimiento, el rover europeo afina su equipo para los desafíos que se avecinan. ExoMars 2022 llevará...

Trabajando para vencer al COVID-19
Como todos, SpaceRobotics.EU se ha visto obligada a tomar medidas extraordinarias ante la presente alerta sanitaria. Además de pedir a todos nuestros empleados que teletrabajen on-line para limitar el contacto y frenar la propagación, en SpaceRobotics.EU hemos querido...
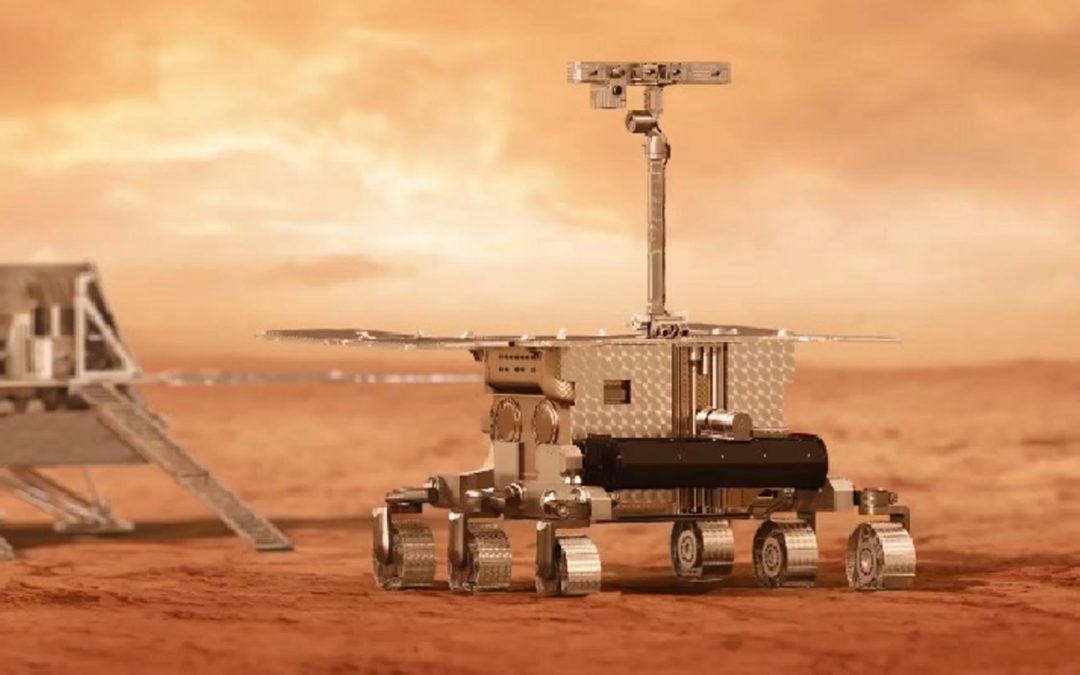
Nueva Versión del Robot 1:2 del Rosalind Franklin de ExoMars
Actualizamos nuestro modelo funcional a escala 1:2 de Rosalind Franklin, el rover planetario de la misión ExoMars. Acerca de ExoMars 2020 ExoMars 2020 llevará un rover y una plataforma de superficie a nuestro planeta vecino. Igual que en la anterior misión de ExoMars,...
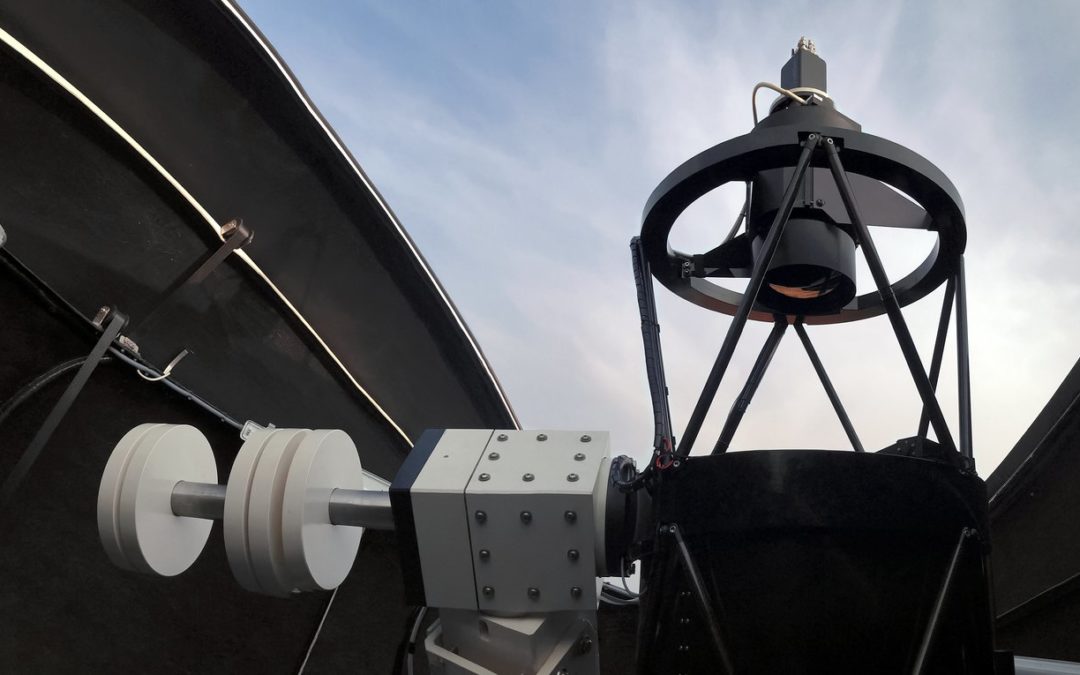
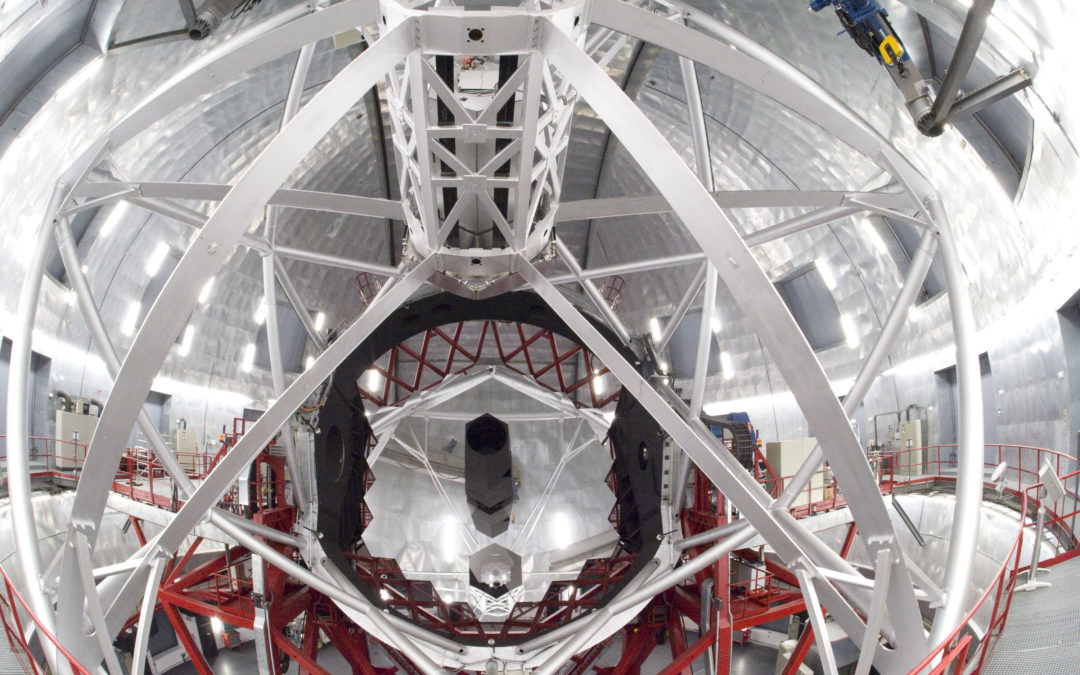
Software y documentación para el telescopio robótico TBT
Hemos ensamblado el software para un nuevo e innovador proyecto: TBT, un telescopio robótico que tratará de localizar objetos sin identificar en el entorno de nuestro planeta. Integrado en los programas SSA y GSTP de la ESA, el proyecto TBT nació en 2012 para detectar...
Robot 1:2 del Rosalind Franklin de ExoMars
Diseñamos y contruimos un modelo funcional a escala 1:2 de Rosalind Franklin, el rover planetario de la misión ExoMars. Acerca de ExoMars 2020 ExoMars 2020 llevará un rover y una plataforma de superficie a nuestro planeta...

Demostrador del Cohete Ariane 5
Como parte de nuestro sólido compromiso con la educación y la divulgación científica, hemos diseñado y construido un simulador-demostrador del legendario cohete Ariane 5. El modelo interactivo muestra las diferentes etapas del cohete, y es perfecto para usarse en...
Maqueta Robótica del Telescopio TBT
Hemos desarrollado una maqueta totalmente funcional de un telescopio TBT, se mueve como el de verdad y puede incluso controlarse desde el móvil. Integrado en los programas SSA y GSTP de la ESA, el proyecto TBT nació en 2012 para detectar y seguir NEOs. La ESA (Agencia...
Instalación Robótica de Seguridad para el Observatorio
Recientemente hemos diseñado e instalado con éxito el sistema de seguridad para un observatorio astronómico. Las instalaciones de seguridad son una parte crucial en un observatorio amateur o profesional. Los telescopios y la instrumentación deben estar preparados para...

Instalación de Telescopio Robótico y diseño de Software
Instalamos un telescopio robótico en el Complejo de Comunicaciones con el Espacio Profundo de Madrid (MDSCC) de la NASA. El telescopio ya es operativo y se controla remotamente durante las observaciones, en el futuro esperamos que sea completamente automático. El...

Instalación del primer telescopio en Boadilla del Monte
Hemos diseñado de cero e instalado con éxito el primer observatorio de Boadilla del Monte. El proceso ha incluido la creación de bocetos y planos, piezas hechas a mano, soluciones a medida, la instalación al completo, el diseño del software de control y su...